
PICK AND PLACE ROBOT
WORK IN PROGRESS
INTRODUCTION:
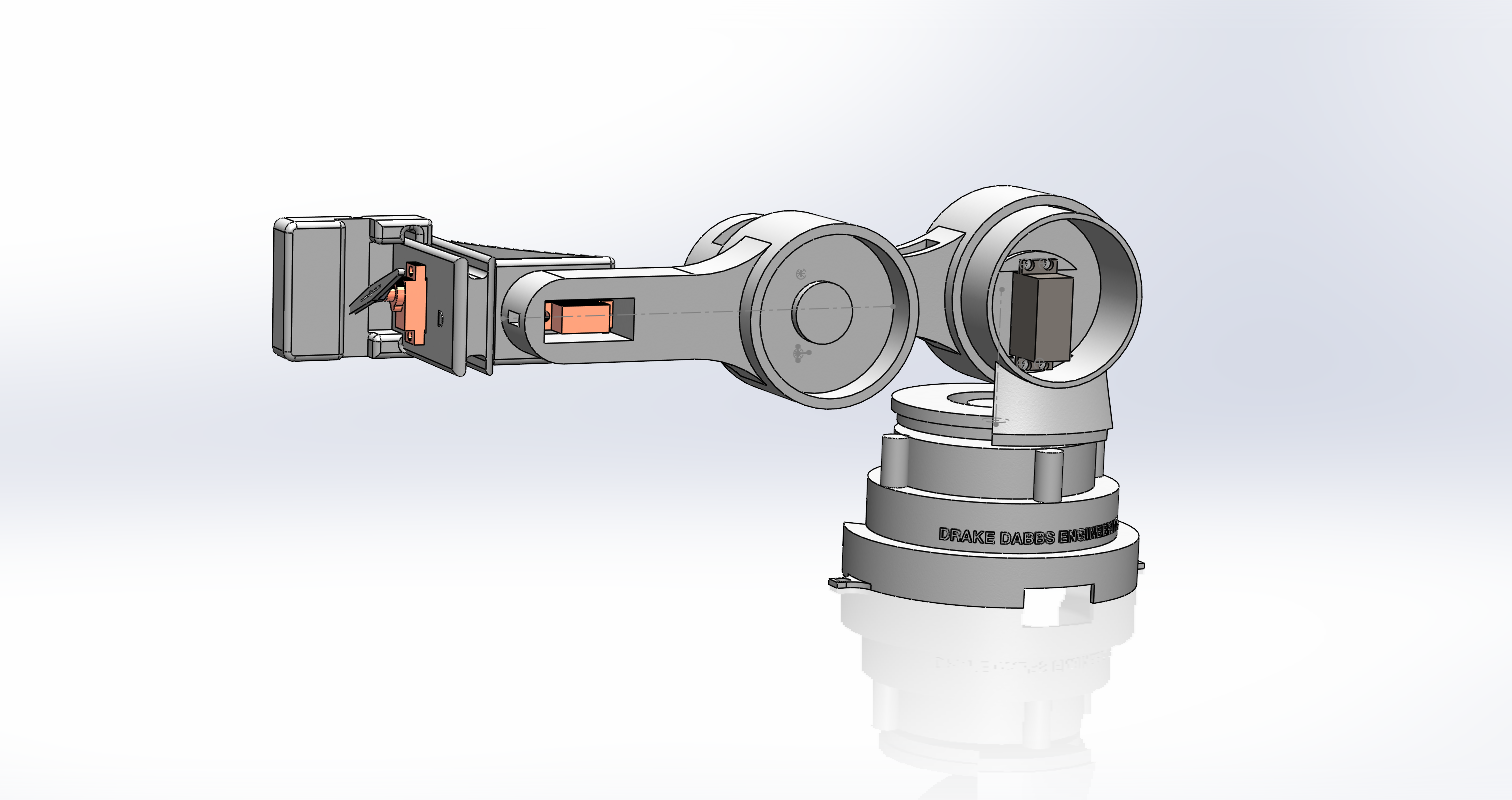
This is a Personal Project I am using to combine and apply my knowledge of Mechanical/Electrical Design using SolidWorks and Arduino UNO microprocessor. This robot should be able to pick and place standard 16floz water bottles and other light objects of similar dimensions using a 4DOF lightweight frame and band assisted sliding gripper.
SKILLS USED:
-SolidWorks
-Mechanical Design
-Arduino
-C+
GOALS:
My Goal is for this project to be fully automatically controlled through the Arduino IDE, then manually controllable using a series of potentiometers.
Eventually this machine will be the mechanical basis for future projects where I wish to program joint movements through inverse kinematics


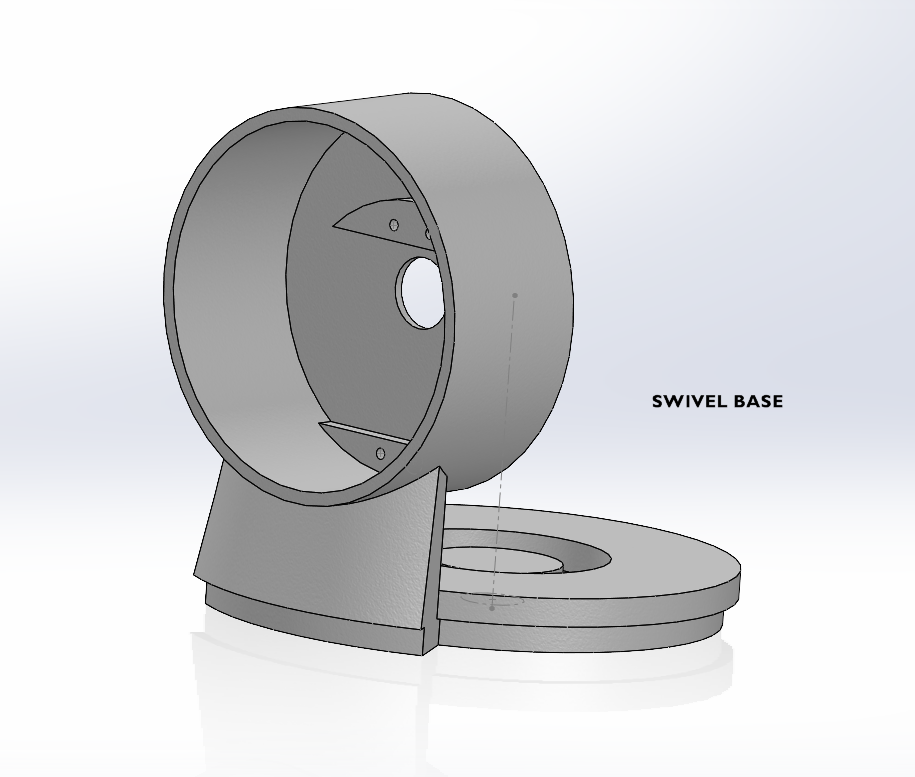
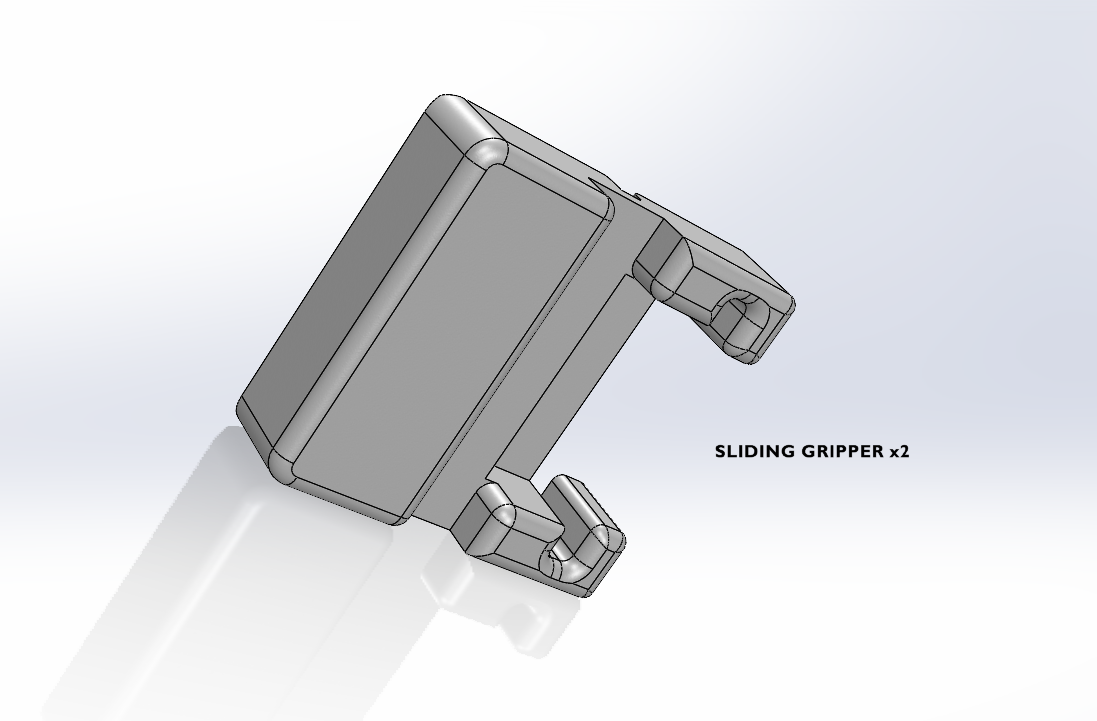
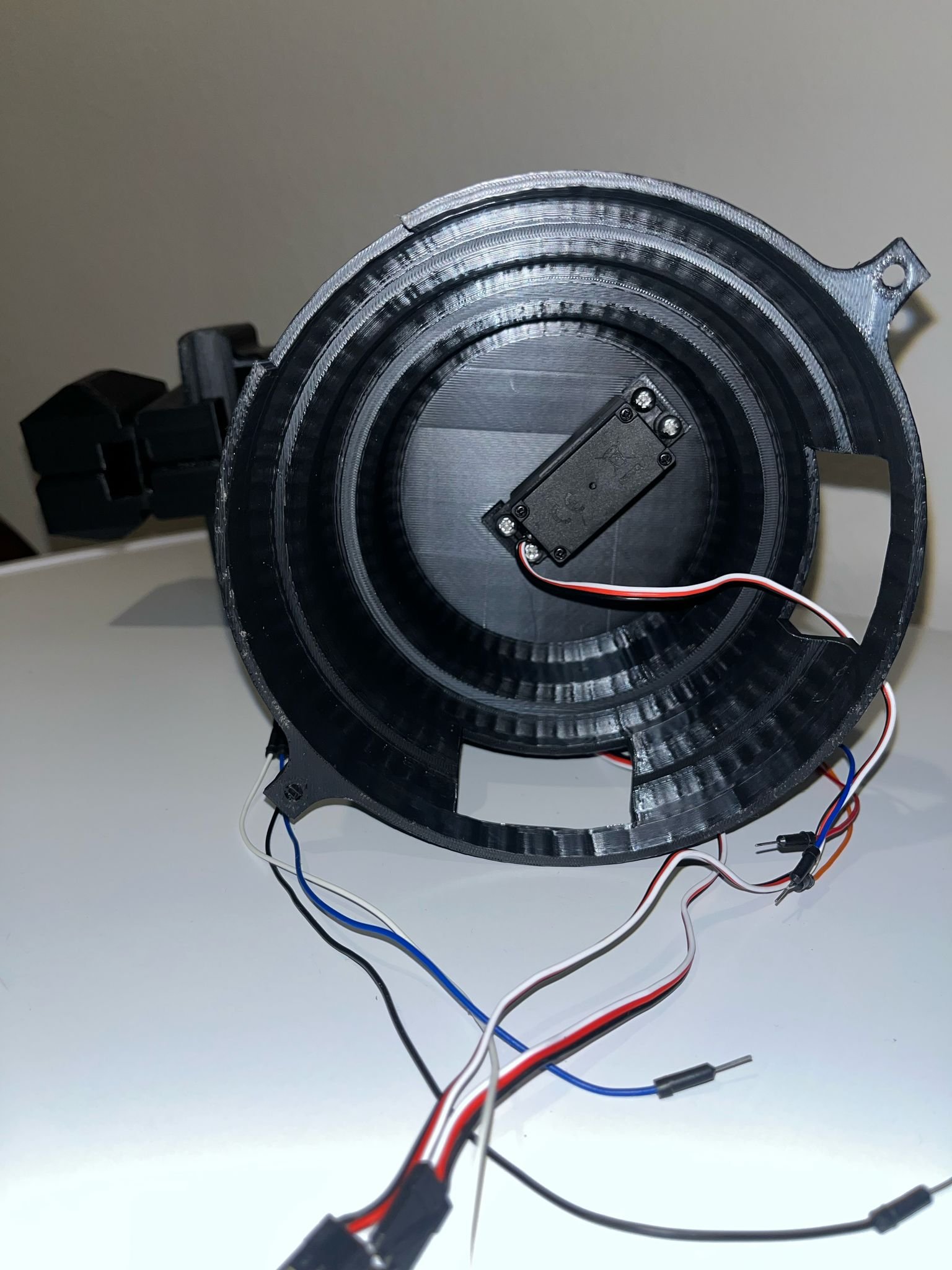
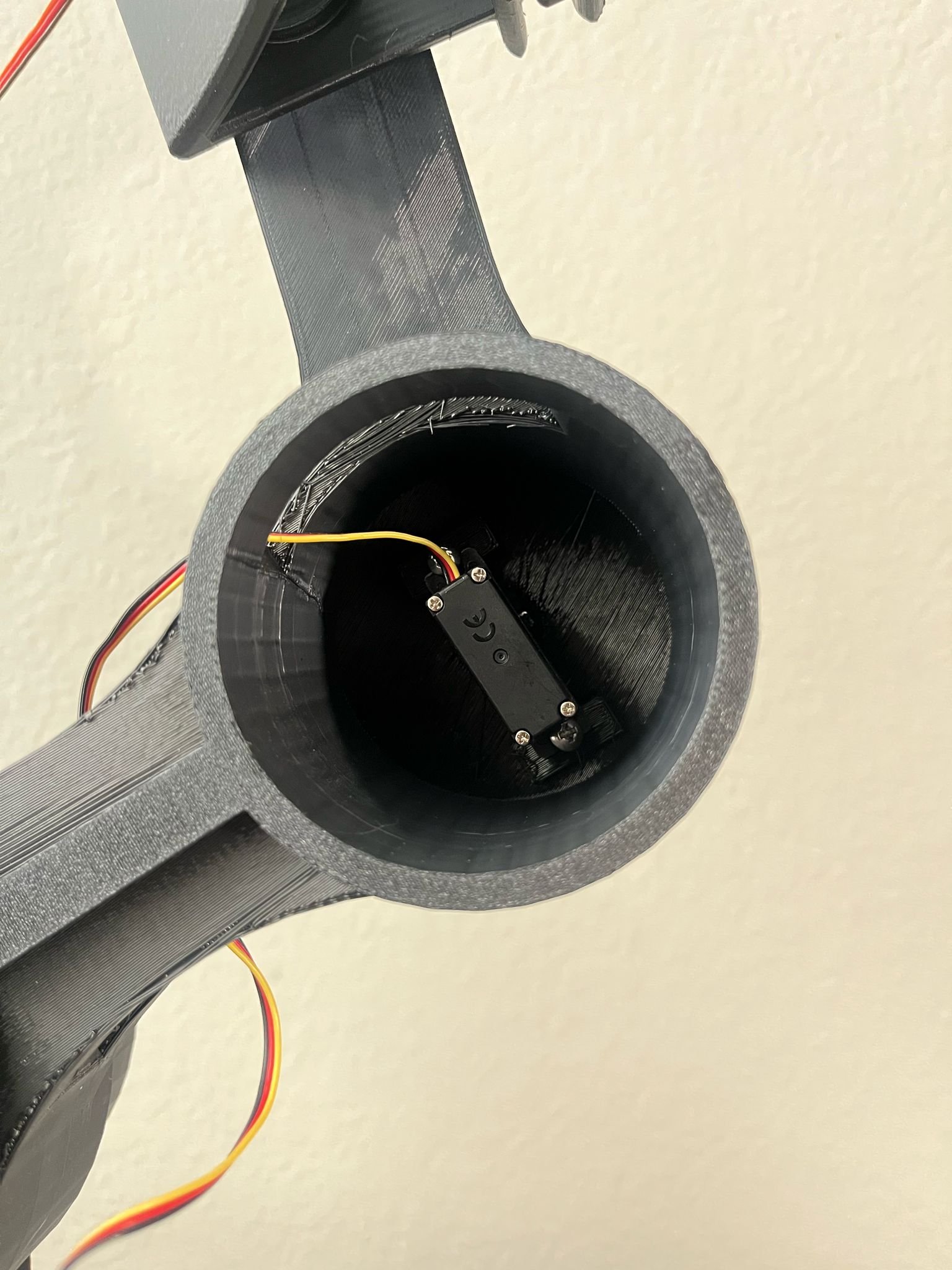
MECHANICAL COMPONENTS




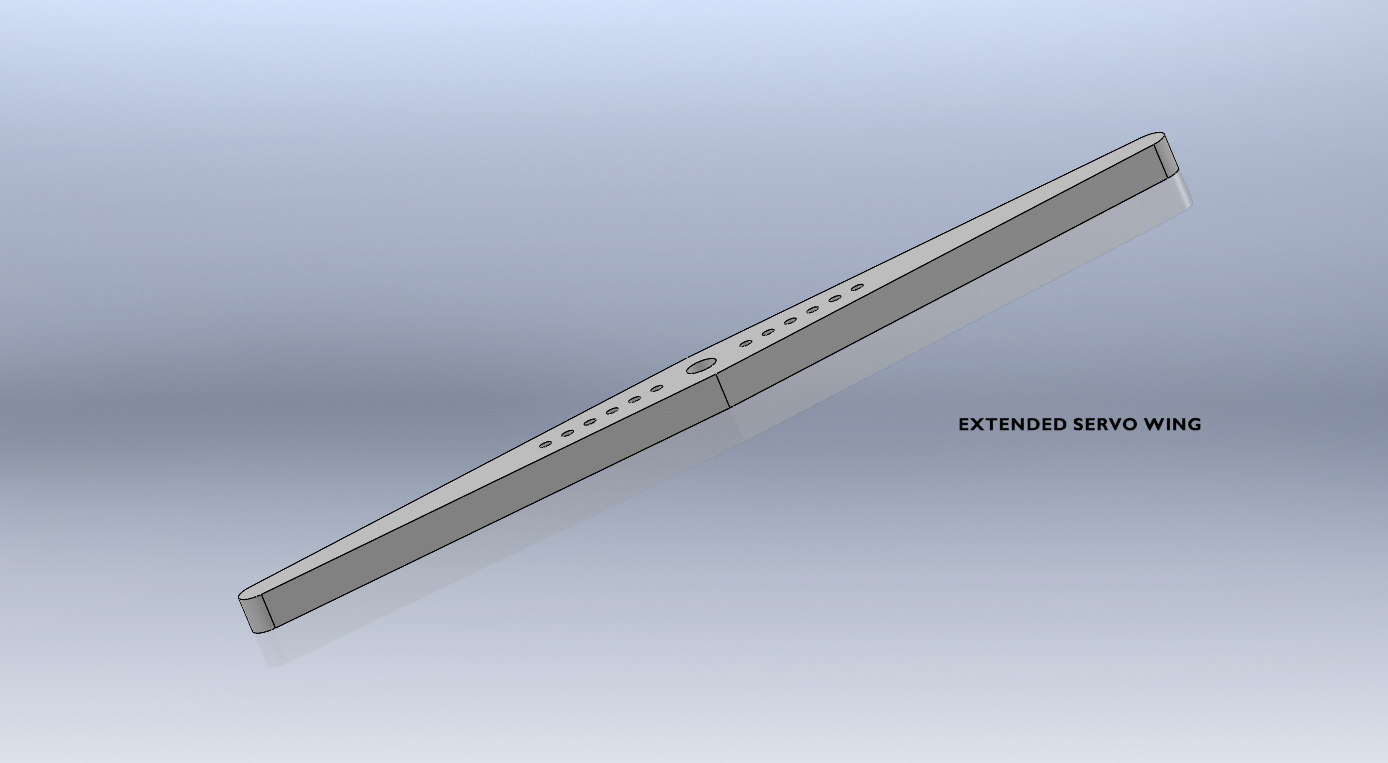
SERVO ATTACHMENTS


SERVO + POTENTIOMETER PROGRAM AND TEST

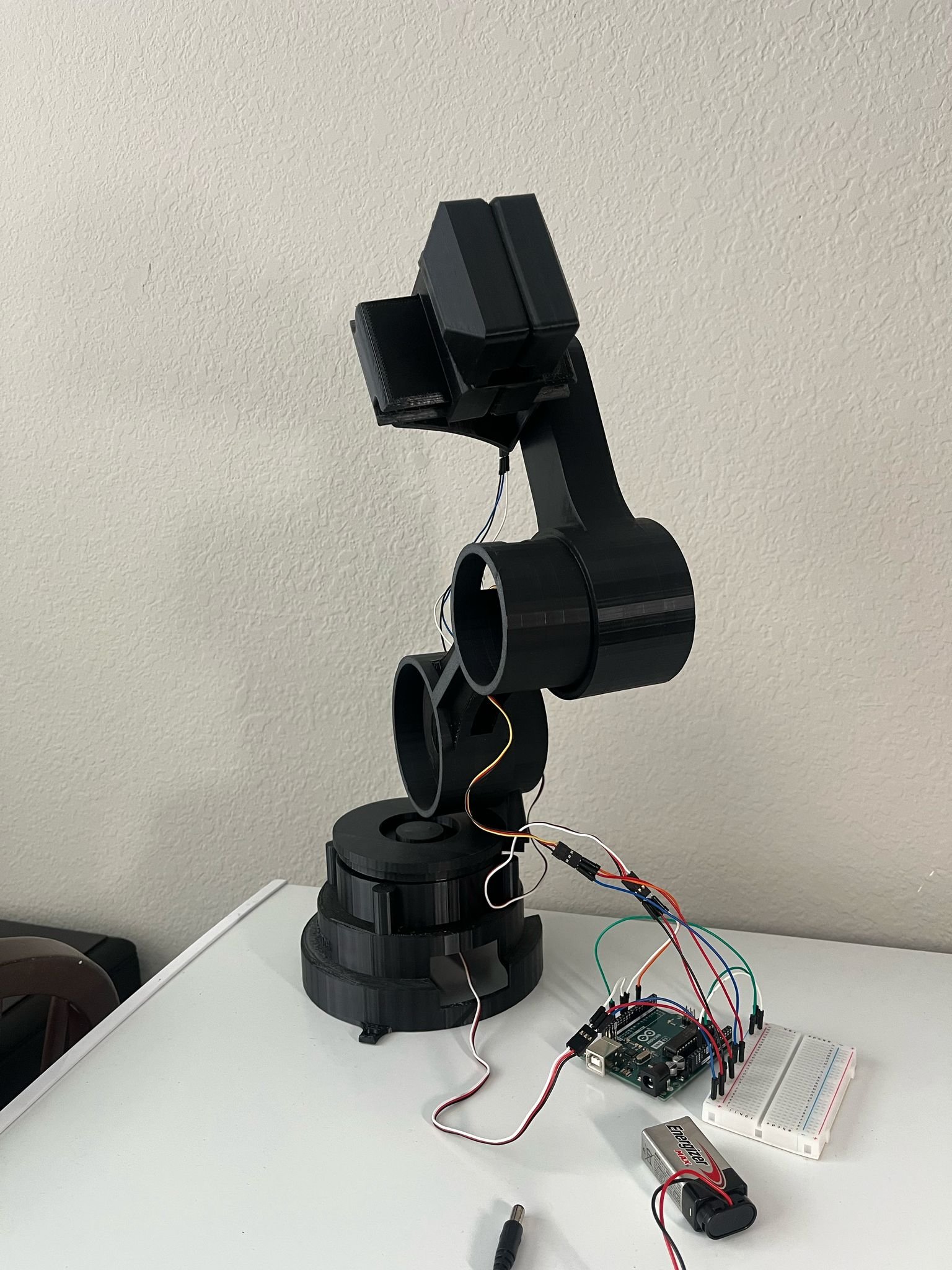
MOVEMENT, STABILITY & GRIPPER TESTING





